랜덤 길찾기 알고리즘을 발전시킬 것이다.
지금의 알고리즘은 단지 20km이내에 있는 관광지를 무작위적으로 추천해주는 알고리즘이다.
그 결과 T자, 8자등 만든 사람도 별로 내키지 않는 경로를 안내해준다.
경로 안내 알고리즘을 발전시키기 위해 3가지 방법을 생각해냈고, 각각의 알고리즘은 다음과 같다.
알고리즘 설명
- 직선거리 주변 경유지 탐색 알고리즘
원래 경로에서 크게 벗어나지 않는 경로를 원하거나,
짧은 경로 + 적은 경유지 상황에서 효과적이다.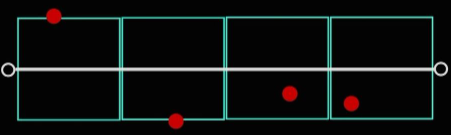
- 큰 정사각형의 구간별 경유지 탐색 알고리즘
1번 보기보다 좀더 무작위적인 경로를 원하거나,
긴 경로 + 많은 경유지를 원할때 효과적인 방법이다.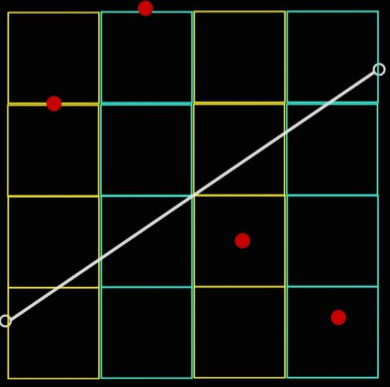
- 순환형 드라이브 코스 추천 알고리즘
다른 보기와는 달리 집에서 출발해 집으로 돌아오는 알고리즘이다.
경로검색 한번으로 하루 드라이브 코스를 모두 정해줄 수 있다.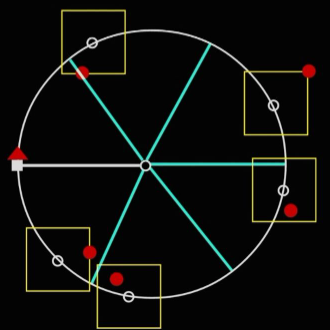
유틸리티 메서드
- getRandomAngle
원하는 각도 범위를 주면 무작위 각도를 반환하는 메서드이다.
무작위 목적지를 반환하는 메서드와 순환형 드라이브 코스 추천 메서드에서 사용된다.
private double getRandomAngle(int angleRange) { Random random = new Random(); // 0부터 3600 사이의 무작위 정수를 얻음 int randomInt = random.nextInt(angleRange * 10 + 1); // 랜덤 각도 구해줌 // 정수를 10으로 나누어 각도를 얻음 (0.1 단위로) double angle = randomInt / 10.0; // 점검용 System.out.println("무작위 각도: " + angle); return angle; } - calculateDistance
두 점 사이 거리를 계산해주는 메서드이다. 좌표값을 기준으로 구해줘서 '실제 거리 / 100'의 형태로 반환된다.
private double calculateDistance(double originY, double originX, double destinationY, double destinationX) { double deltaY = destinationY - originY; double deltaX = destinationX - originX; // 유클리드 거리 계산 return Math.sqrt(deltaY * deltaY + deltaX * deltaX); } - getRandomWayPoint
특정 좌표 주변 경유지를 골라주는 메서드이다. KakaoCategorySearchService의 기능을 이용한다.
private RandomDocumentDto getRandomWayPoint(double y, double x, double redius) { Random rd = new Random(); KakaoApiResponseDto responses = kakaoCategorySearchService.requestPharmacyCategorySearch(y, x, redius); int randomLength = responses.getDocumentDtoList().size(); if (randomLength == 0) return null; int wayPointCnt = rd.nextInt(randomLength); return new RandomDocumentDto(responses.getDocumentDtoList().get(wayPointCnt)); }
주요 메서드
- 무작위 목적지 구해주기
출발지에서 무작위 각도, distance만큼 떨어진 곳의 주변 2km 이내의 관광지를 목적지로 설정해준다.
우리나라의 3면이 바다이고, 산지도 꽤 많은것을 고려하면 해당 지점에 아무것도 없을 수 있다.
만일 해당 지점에 아무것도 없다면, 목적지로부터 출발지에 대칭인 곳 주변에서 목적지를 찾는다.
그래도 없다면, x좌표 대칭점, 또 그래도 없다면 y좌표 대칭점 주변에서 목적지를 구해준다.
private DocumentDto getDestination(double originY, double originX, double distance) {
double radians = Math.toRadians(getRandomAngle(360));
double randomY = originY + distance * Math.sin(radians);
double randomX = originX + distance * Math.cos(radians);
double tempY = randomY; // 임시 Y 좌표
double tempX = randomX; // 임시 X 좌표
// 목적지 값을 반경으로 계산해서 가져오는 메소드
KakaoApiResponseDto responses = kakaoCategorySearchService.requestPharmacyCategorySearch(randomY, randomX, 2);
// 랜덤으로 다중 목적지와 경유지 만들기 알고리즘
int randomLength = responses.getDocumentDtoList().size();
// 만일 찍은 좌표 주변에 아무것도 없다면..?
if (randomLength == 0) { // 출발지 좌표를 기준으로 대칭되는 곳의 좌표를 목적지 좌표로 수정
randomX -= 2 * (randomX - originX);
randomY -= 2 * (randomY - originY);
responses = kakaoCategorySearchService.requestPharmacyCategorySearch(randomY, randomX, 2);
randomLength = responses.getDocumentDtoList().size();
if (randomLength == 0) { // 출발지 좌표를 기준으로 Y좌표가 대칭되는 곳의 좌표를 목적지 좌표로 수정
randomX = tempX;
responses = kakaoCategorySearchService.requestPharmacyCategorySearch(randomY, randomX, 2);
randomLength = responses.getDocumentDtoList().size();
if (randomLength == 0) { // 출발지 좌표를 기준으로 X좌표가 대칭되는 곳의 좌표를 목적지 좌표로 수정
randomX -= 2 * (randomX - originX);
randomY = tempY;
responses = kakaoCategorySearchService.requestPharmacyCategorySearch(randomY, randomX, 2);
}
}
}
Random rd = new Random();
int destinationCnt = rd.nextInt(randomLength);
DocumentDto destination = responses.getDocumentDtoList().get(destinationCnt);
return destination;
}
- 직선거리 주변 경유지 탐색 메서드
처음 설명한대로, 직선거리 주변의 경유지를 추천해준다.
직선거리 / 경유지수와 20 중 더 작은 값으로 주변의 경유지를 탐색하는 범위를 결정한다.
private List<RandomDocumentDto> getWayPointsAroundLine(double originY, double originX, double destinationY, double destinationX, Integer count) { double distance = calculateDistance(originY, originX, destinationY, destinationX); double realDistance = distance * 100; List<RandomDocumentDto> wayPoints = new ArrayList<>(); for (int i = 1; i <= count; i++) { double tempY = originY + (destinationY - originY) * i / count; double tempX = originX + (destinationX - originX) * i / count; double redius = Math.min(realDistance/count, 20); RandomDocumentDto wayPoint = getRandomWayPoint(tempY, tempX, redius); wayPoints.add(wayPoint); } return wayPoints; } - 큰 정사각형의 구간별 경유지 탐색 알고리즘
1. 출발지, 목적지 좌표를 이용해 middleX, middleY(중점)를 구해준다.
2. 출발지, 목적지 좌표를 이용해 둘의 X좌표 차이(distanceX), Y좌표 차이(distanceY) 를 구해준다.
만일 distanceX가 더 크다면 출발지와 목적지는 정사각형의 x 좌표 양쪽 끝, 반대라면 y좌표 양쪽 끝에 위치한다.
3. 만일 distanceX가 더 크다고 치자,
originX가 middleX보다 크다면 X좌표를 점점 줄이는 방향으로 경유지를 선정해야 하고,
originX가 middleX보다 작다면 X좌표를 점점 증가시키는 방향으로 경유지를 선정해야 한다.
distanceY가 distanceX보다 클 때는 X를 Y로 바꾸기만 하면 된다.
4. X좌표가 점점 줄어들 때마다, Y좌표는 랜덤 알고리즘을 이용해 구해준다.
그 결과 원하는 개수의 경유지만큼의 경유지가 생성될 것이다.
private List<RandomDocumentDto> getWayPointsInBox(double originY, double originX, double destinationY, double destinationX, Integer count) { List<RandomDocumentDto> wayPoints = new ArrayList<>(); double middleY = (originY + destinationY) / 2; double middleX = (originX + destinationX) / 2; double distanceY = Math.abs(originY - destinationY); double distanceX = Math.abs(originX - destinationX); double sideLength = Math.max(distanceY, distanceX); if (sideLength == distanceY) { if(originY > middleY) { for (int i = 0; i < count; i++) { Random rd = new Random(); double randomY = originY - sideLength / count / 2 - sideLength / count * i; double randomX = middleX - sideLength / 2 + sideLength / count * rd.nextInt(count); double redius = Math.min(sideLength/count * 100, 20); RandomDocumentDto wayPoint = getRandomWayPoint(randomY, randomX, redius); wayPoints.add(wayPoint); } } else { for (int i = 0; i < count; i++) { Random rd = new Random(); double randomY = originY + sideLength / count / 2 + sideLength / count * i; double randomX = middleX - sideLength / 2 + sideLength / count * rd.nextInt(count); double redius = Math.min(sideLength/count * 100, 20); RandomDocumentDto wayPoint = getRandomWayPoint(randomY, randomX, redius); wayPoints.add(wayPoint); } } } else { if(originX > middleX) { for (int i = 0; i < count; i++) { Random rd = new Random(); double randomX = originX - sideLength / count / 2 - sideLength / count * i; double randomY = middleY - sideLength / 2 + sideLength / count * rd.nextInt(count); double redius = Math.min(sideLength/count * 100, 20); RandomDocumentDto wayPoint = getRandomWayPoint(randomY, randomX, redius); wayPoints.add(wayPoint); } } else { for (int i = 0; i < count; i++) { Random rd = new Random(); double randomX = originX + sideLength / count / 2 + sideLength / count * i; double randomY = middleY - sideLength / 2 + sideLength / count * rd.nextInt(count); double redius = Math.min(sideLength/count * 100, 20); RandomDocumentDto wayPoint = getRandomWayPoint(randomY, randomX, redius); wayPoints.add(wayPoint); } } } return wayPoints; } - 순환형 드라이브 코스 경유지 추천 메서드
1. 출발지에서 무작위 각도, distance/2만큼 떨어진 곳의 좌표를 원의 중점을 잡는다.
이때 얻은 무작위 각도를 + 180 = 원의 중점에서 출발지의 각도이다.
2. 원하는 경유지의 개수 + 1 만큼 원을 쪼개줄 것이다. 이때 + 1은 출발지를 나타낸다.
3. 쪼개진 구간별로 랜덤한 각도를 계산한다.
4. 중점에서 구한 각도, distance/2만큼 떨어진 곳의 좌표 주변 2km 내에서 경유지를 찾아준다.
private List<RandomDocumentDto> getWayPointsCircular(double originY, double originX, double redius, Integer count) { List<RandomDocumentDto> wayPoints = new ArrayList<>(); double degree = getRandomAngle(360); double radian = Math.toRadians(degree); double rediusY = originY + redius * Math.sin(radian); double rediusX = originX + redius * Math.cos(radian); System.out.println("중점 : " + rediusY + ", " + rediusX); int rangeDegree = 360 / (count + 1); for (int i = 0; i < count; i++) { double wayPointRadian = Math.toRadians(degree + 180 + getRandomAngle(rangeDegree)+ rangeDegree * i); System.out.println("각도 : " + wayPointRadian); double wayPointY = rediusY + redius * Math.sin(wayPointRadian); double wayPointX = rediusX + redius * Math.cos(wayPointRadian); System.out.println("정점" + (i+1) + " : " + wayPointY + ", " + wayPointX); RandomDocumentDto wayPoint = getRandomWayPoint(wayPointY, wayPointX, 2); if (wayPoint != null) wayPoints.add(wayPoint); } return wayPoints; }
주의할 점
2, 3번 기능은 너무 먼 거리를 설정할 경우 드라이브 코스로 생각할 수 없을만큼 오래 운전해야 하는 코스를 추천해준다.
3번은 최대 40km까지 2번은 최대 60km까지만 갈 수 있게 설정해놓자.
'프로젝트 > RanDrive' 카테고리의 다른 글
| 기능 개선(경유지를 가진 경로 이탈 시 처리) (0) | 2023.11.01 |
|---|---|
| 기능 개선(JMeter) (0) | 2023.10.30 |
| https 배포 (0) | 2023.10.28 |
| Random-Drive-Project 기본 MVC 구현(프론트엔드 작업) (0) | 2023.10.26 |
| Random-Drive-Project 기본 MVC 구현(경로 조회, 상세조회) (1) | 2023.10.18 |



